Строение квадрокоптера
Внешнее строение коптера
Расположение различных элементов может отличаться у разных моделей дронов. Рассмотрим внешнее строение на примере модели DJI Mavic Pro.
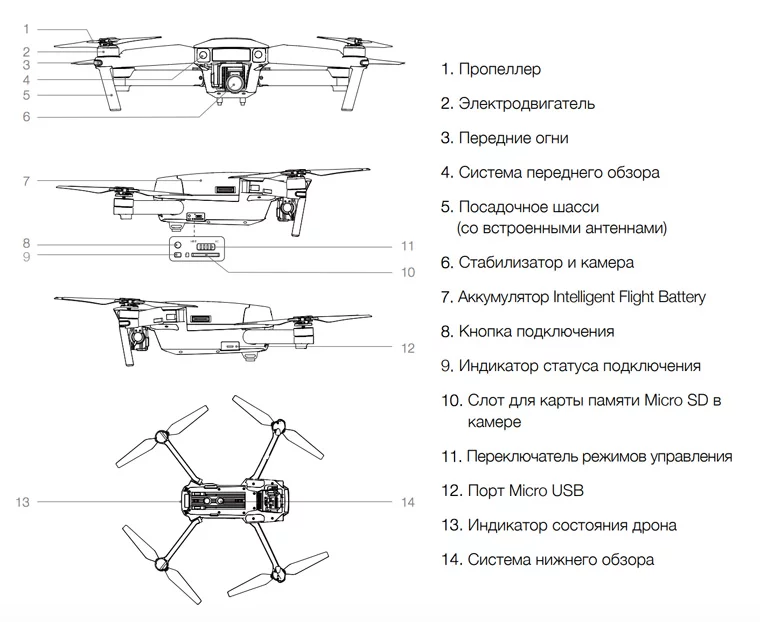
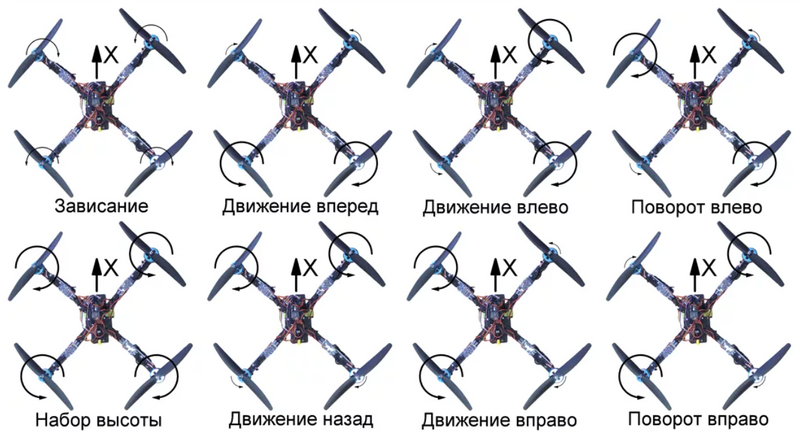
Пропеллеры отвечают за передвижение летательного аппарата в воздухе вперед и назад, вверх и вниз. Они попарно подавляют крутящие моменты друг друга, стабилизируя коптер. Их изготавливают из пластика или композитных материалов.

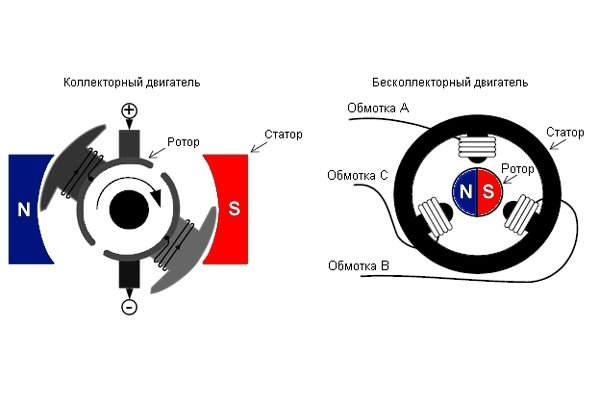
Эффективный двигатель не только обеспечивает отличное пилотирование, но и сокращает расходы на обслуживание и покупку дополнительного оборудования. Чем мощнее двигатель, тем больше время автономной работы дрона. Мощность двигателя также влияет на параметры полезной нагрузки, которую может нести дрон. Бесколлекторные двигатели считаются более эффективными, чем коллекторные с точки зрения производительности.
Передние огни показывают расположение дрона в пространстве и состояние некоторых функций. Обычно это непрерывные красные огни на передней части дрона. Во время полета они остаются красными, не мигая, и дают пилоту визуальную индикацию того, куда движется дрон. Ночью данная функция помогает пилотам ориентироваться в пространстве.

Системы переднего и нижнего обзора дрона позволяют проводить непрерывный обзор пространства на предмет наличия препятствий и избегать столкновений путём облёта, прохода над препятствием или зависания. Благодаря системе переднего обзора дрон способен начинать активное торможение при обнаружении препятствий, система нижнего обзора играет большую роль в приземлении дрона. Данные системы функционируют лучше всего в условиях соответствующей освещённости.

Посадочные шасси необходимы не всем коптерам, но большинство дронов оснащаются различными их вариантами. Беспилотники c подвесной камерой, как правило, получают высокое шасси с большим клиренсом. Шасси могут быть фиксированными, а могут убираться, предоставляя камере обзор на 360 градусов, что важно для специализированных беспилотников.

Стабилизатор нужен для того, чтобы качество фотографий и видео с дрона не ухудшалось из-за тряски и вибраций. Обычно камера может двигаться по желанию оператора, за что как раз отвечает подвеска со стабилизатором.

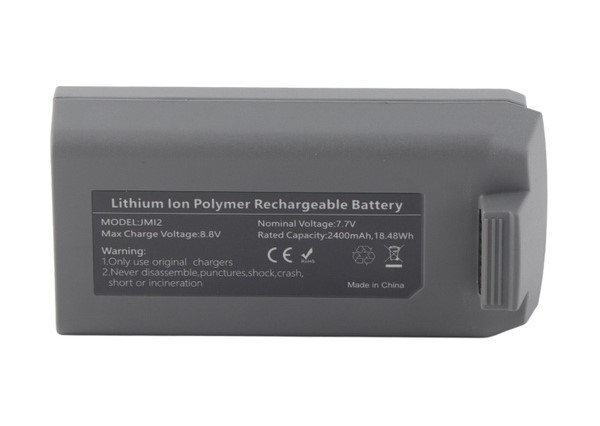
Аккумуляторная батарея является одной из основных частей дрона. Без нее невозможно запустить дрон и выполнить поставленные полетные задачи. Небольшие и любительские дроны оснащаются батареями небольших размеров с небольшой емкостью и мощностью, что в конечном итоге влияет на полетное время и рассчитанную полезную нагрузку. Специализированные дроны требуют более мощной батареи ввиду сложности и большего объема решаемых задач. Благодаря этому у промышленных коптеров полетное время и допустимый вес полезной нагрузки больше.
Чаще всего для сопряжения дрона с пультом управления нужно зажать кнопку подключения и удерживать несколько секунд. Далее действовать по инструкции.

Индикатор статуса подключения показывает, сопряжен ли дрон с пультом управления.

Карту памяти рекомендуется использовать с объемом от 64 до 256 ГБ и скоростью записи не менее МБ/с, а также важно иметь запасную. Несмотря на рекомендации, нужно учитывать специфические характеристики конкретной модели дрона, так как требования к карте памяти могут отличаться.

Переключатель режимов полета позволяет выбирать один из трех режимов. Режим T используется для съемки, датчик обнаружения препятствий работают лучше всего, но скорость сильно ограничена. Режим S, спорт режим, отключает все датчики, зато может развивать намного большую скорость. Режим P — режим позиционирования, при котором используются модуль спутниковой навигации и другие датчики, делая движения коптера плавным.

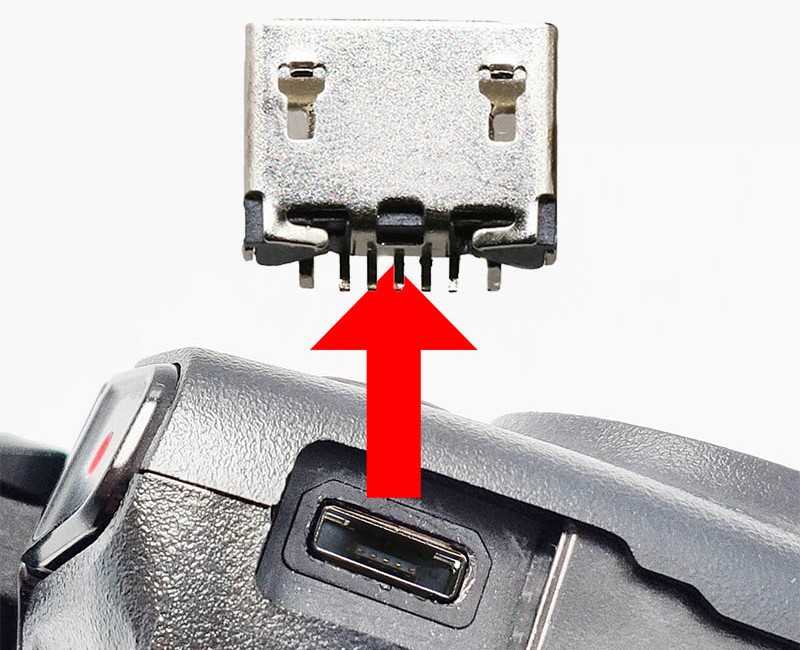
Порт Micro USB непосредственно в коптере нужен не для зарядки, а для подключения к, например, компьютеру, если требуется перепрошивка, а также для передачи фотографий и видео без использования карты памяти.
В некоторых моделях, в том числе DJI Mavic Pro, индикатор состояния может сообщать о различных происшествиях, например, потере сигнала управления, низком заряде аккумулятора, ошибке модуля IMU и так далее. Обычно он расположен в задней части коптера.

Элементы внутреннего строения коптера
Существует множество конфигураций квадрокоптеров, но мы рассмотрим основные их составляющие.
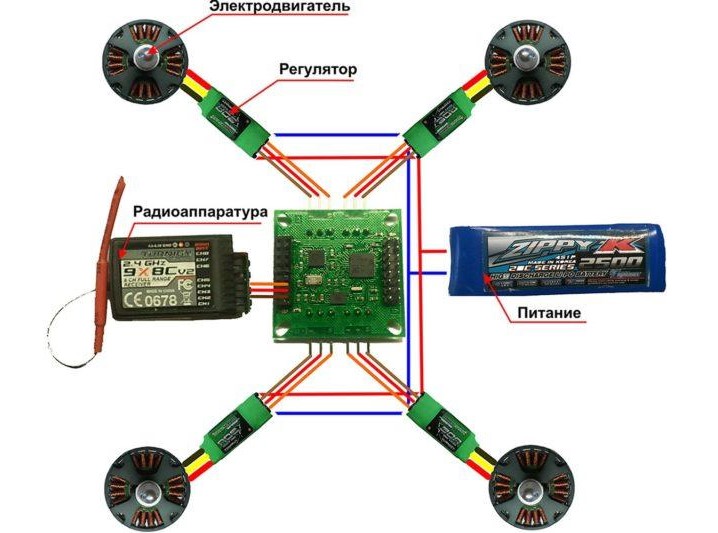
Электронный регулятор скорости (ESC) — устройство, контролирующее скоростной режим квадрокоптера. Оно передает энергию от аккумулятора к двигателю, преобразуя постоянный ток в переменный. Обычно расчет тока для привода проводится на основе характеристик дрона с прибавлением 25-30%.

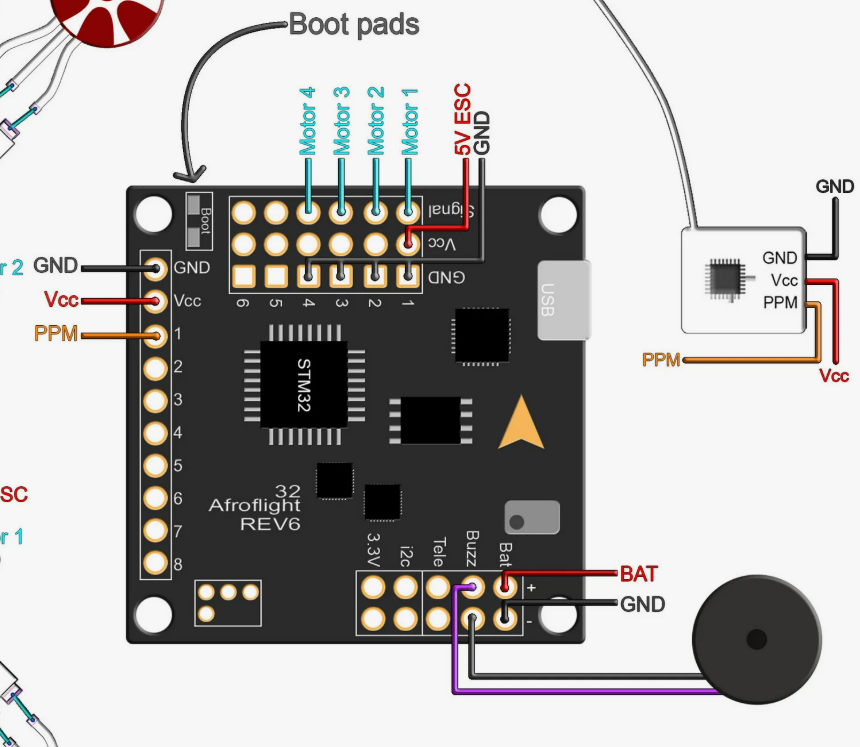
Полетный контроллер интерпретирует входящие данных от приемника, модуля GPS, монитора батареи и бортовых датчиков. Также он следит за работой двигателя и скоростью. Любые команды отправляются полетным контроллером. Обычно, пользователю не нужно вносить как-либо редатировать работу устройства, так как это может негативно сказаться на точности выполнения функций
Приемник – это устройство, отвечающее за прием радиосигналов, посылаемых дрону через контроллер. Для эффективного управления беспилотником необходимо минимум четыре канала.
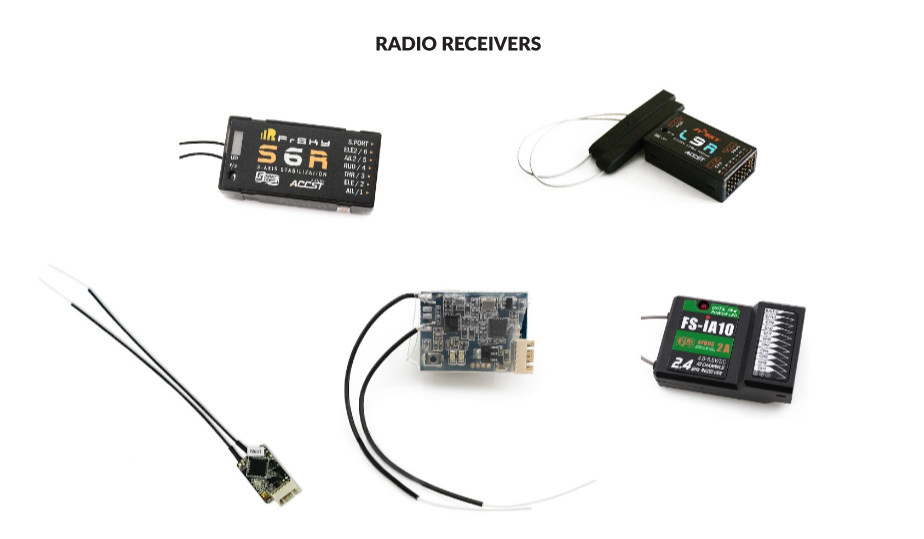
Передатчик отвечает за передачу сигналов от контроллера к дрону. Передатчик должен иметь не менее четырех каналов для работы с беспилотником, но обычно рекомендуется использовать 5. Передатчик должен использовать тот же радиосигнал, что и приемник.

Модуль спутниковой навигации чаще всего представлен модулем GPS, но иногда можно встретить двойную систему навигации, которая включает в себя комбинации GPS и ГЛОНАСС или же GPS и Бэйдоу. Модуль спутниковой навигации сообщает полетному контроллеру данные о местоположении аппарата, с его помощью летательный аппарат не только ориентируется в пространстве во время полета, но и может в автоматическом режиме вернуться на точку взлета, даже если его визуальные датчики и штатная камера не работают, а связь с пультом дистанционного управления разорвана.
